Введение.
Литий-ионные аккумуляторы являются стандартом де-факто в области источников питания для электромобилей, систем бесперебойного питания, мобильных устройств и гаджетов . Другой пример использования литий-ионных аккумуляторов – накопители для возобновляемых источников энергии (главным образом, солнечные батареи и ветрогенераторы). Так в 2011 году в Китае был установлен накопитель на литий-ионных аккумуляторах общей емкостью 36 МВтч, способный отдавать в сеть 6 МВт электрической мощности в течение 6 часов . Примером противоположного масштаба являются литий-ионные батарей для имплантируемых кардиостимуляторов, ток нагрузки которых составляет порядка 10 мкА . Сам диапазон емкости единичного коммерчески выпускаемого литий-ионного элемента давно перешагнул отметку 500 Ач .
Использование литий-ионных аккумуляторов предполагает соблюдение параметров разряда и заряда батареи, в противном случае может произойти необратимая деградация емкости, выход из строя и даже возгорание батареи из-за саморазогрева. Поэтому литий-ионные аккумуляторы всегда применяются вместе с системой контроля и управления – СКУ или BMS (battery management system) . Система управления батареей выполняет защитные функции, контролируя температуру, ток заряда-разряда и напряжение, таким образом предотвращая слишком глубокий разряд, перезаряд и перегрев. Также BMS осуществляет контроль состояния батареи с помощью оценки степени заряда (State of Charge, SOC) и состояния годности (State of Health, SOH). Интеллектуальный BMS является необходимым в практически любом применении литий-ионных батарей, предоставляя информацию сколько устройство будет работать до необходимости подзарядки (значение SOC) и когда следует заменить батарею из-за потери емкости (значение SOH).
В настоящей работе мы сосредоточимся на моделях для оценки состояния SOC и SOH, пригодных для реализации в реальном времени в системах управления батареями. К сожалению, в русскоязычной научной литературе практически отсутствуют какие-либо публикации, рассматривающие подобные вопросы именно для литий-ионных аккумуляторов. Поэтому в этой статье мы попробуем восполнить данный пробел.
1. Предварительные сведения.
1.1. Литий-ионная батарея – элементарное описание.
Схематически процессы разряда и заряда литий-ионного аккумулятора можно представить на рисунке 1 .
Рисунок 1. Элементарное представление процессов в литий-ионном аккумуляторе.
Батарея состоит из углеродного анода и катода из оксида металла, содержащего также литий (например, LiMn2O4). Положительные ионы лития Li+ мигрируют между анодом и катодом через органический электролит. Важным моментом является то, что литий никогда не возникает в свободном металлическом состоянии – происходит только обмен его ионами между катодом и анодом. Поэтому такие аккумуляторы получили название «литий-ионные»
При заряде литий-ионного аккумулятора происходит деинтеркаляция (изъятие) лития из литийсодержащего катода и интеркаляция (внедрение) ионов лития в углеродный материал анода. При разряде аккумулятора процессы идут в обратном направлении: отрицательный заряд переносится потоком электронов с катода на анод, а ионы лития двигаются в обратном направлении – с анода на катод.
Более подробное описание процессов мы рассмотрим при моделировании аккумулятора на электрохимическом уровне.
1.2. Системный уровень описания батареи.
Со схемной точки зрения, батарея представляется двухполюсником. В данной работе будет использоваться ее описание в виде черного ящика, как системы с одним входом (ток в цепи ) и напряжение на клеммах батареи .
Напряжение холостого хода (open circuit voltage, OCV) – напряжение на клеммах батареи при отсутствии отбора тока .
Важнейшим параметром является емкость батареи , определяемая как максимальное количество электрической энергии (в Ач), которое батарея отдает в нагрузку с момента полного заряда до состояния разряда, не приводящего к преждевременной деградации батареи.
Как было сказано ранее, основные функции интеллектуального BMS – это оценка SOC и SOH.
Состояние заряда батареи (state of charge, SOC) – показатель, характеризующий степень заряженности батареи: 100% – полный заряд, 0% – полный разряд. Эквивалентный показатель глубина разряда (deepth of discharge, DoD) – . Обычно SOC измеряется в процентах, но в настоящей работе мы будем считать, что . Формально, SOC выражается как , где – текущий заряд в батареи.
Состояние годности батареи (state of health, SOH) – качественный показатель, характеризующий текущую степень деградации емкости батареи. Результатом оценки SOH является не численное значение, а ответ на вопрос: «необходимо ли заменить батарею в данный момент?». В настоящее время нет стандарта, регламентирующего на основе каких параметров батареи должен вычисляться SOH. Разные производители BMS используют для этого различные показатели, например, сравнение исходной и действительной емкости батареи или внутреннего сопротивления.
2. Модели для определения состояния заряда.
Определение состояния заряда SOC является задачей наблюдения за скрытым состояниям системы по имеющейся модели процесса и измеряемому выходному отклику от входного воздействия . Модели, предназначенные для использования в составе систем управления батареями для определения SOC, могут быть классифицированы на две большие группы :
Эмпирические модели, реплицирующие поведение батареи с позиции «черного ящика»;
Физические модели, моделирующие внутренние электрохимические процессы в батарее.
2.1 Эмпирические модели.
Класс эмпирических моделей включает в себя ряд различных подходов, общими чертами являются существенное упрощенное моделирование физических процессов в батарее. Эмпирические модели являются стандартом при реализации BMS, поскольку обладают с одной стороны достаточной простотой для реализации, а с другой – приемлемой точностью для оценки SOC , . Количественное сравнение 28 разных эмпирических моделей содержится в работе .
Основной вид эмпирических моделей – схемы замещения.
Исходной предпосылкой к эмпирическому моделированию является наблюдение, что динамика аккумуляторной батареи может быть разделена на две части ,:
Медленная динамика, связанная с зарядом и разрядом батареи,
Быстрая динамика, связанная с внутренним импедансом батареи: активным сопротивлением электролита и электродов, а также с электрохимическими емкостями.
Процессы старения и деградации емкости моделируются как нестационарность параметров системы.
Фактически, медленная динамика сводится к моделированию влияния SOC на электрические характеристики аккумулятора. Замечено, что напряжение холостого хода (OCV) является достаточно однозначной функцией от состояния заряда (SOC или DoD):
и слабо подвержено температурной вариации (кроме областей, где батарея почти полностью заряжена или разряжена), а также слабо меняется при старении батареи (если считать когда батарея заряжена до своей текущей с учетом деградации емкости) .
Типичные кривые зависимости для литий-ионных аккумуляторов с разной химией показаны на рисунке 2.

Рисунок 2. Типичные зависимости напряжения холостого хода от состояния заряда.
Аппроксимация зависимости может быть выполнена различными способами, в том числе кусочно-линейно или полиномиально. Одним из классических вариантов аппроксимации (1) является уравнение Шеферда (Shepherd model) , модификация которого для литий-ионного аккумулятора имеет вид :
где коэффициенты вычисляются на основе характерных точек кривой разряда батареи, которая обычно приводится в технической документации, а – полный заряд, прошедший из или в батарею за время : .
В работе , например, используется следующее выражение для аппроксимации :
Различные варианты параметризации систематически рассмотрены в работе .
Для получения полной модели батареи уравнение (2) может быть дополнено также слагаемыми, зависящими от тока батареи, например как это реализовано в системе Simulink в блоке Battery из SimPowerSystem (, ).
2.1.2 Внутренний импеданс батареи.
Вторая часть эмпирической модели – описание внутреннего импеданса, отвечающего за вольт-амперные характеристики и быструю динамику.
Самым простым вариантом моделирование является включенное последовательно с регулируемым источником ЭДС активное сопротивление (рисунок 3). Такая схема замещения моделирует внутреннее сопротивление батареи, создаваемое материалами электродов и электролита, на котором наблюдается омическое падение напряжения и выделение тепла.

Рисунок 3. Элементарная схема замещения батареи.
Для моделирования переходных процессов в батарее такая простейшая схема замещения должна быть дополнена реактивными элементами. Таким образом, последовательно с оказывается включено комплексное сопротивление с импедансом .
Обычно выделяют следующие электрохимические явления, существенно влияющие на динамику электрических переходных процессов (, ):
Классический двойной электрический слой в контакте электрод-электролит (Double-Layer)
Образование пассивной плёнки (solid-electrolyte interface, SEI) на электродах.
В результате этих факторов, внутри литий-ионного аккумулятора возникают электрохимические распределенные конденсаторы. Исследование импеданса батареи осуществляется с помощью электрохимической импедансной спектроскопии (Electrochemical Impedance Spectroscopy, EIS) -.
Предложено достаточно большое количество эквивалентных схем -, начиная от простых, содержащих несколько реактивных элементов, заканчивая детальным моделированием электрохимических явлений с помощью большого числа RC-цепочек , и даже нелинейных элементов .
Практически хорошо зарекомендовавший вариант (рисунок 4) эквивалентной схемы основан на последовательном соединении активного внутреннего сопротивления и двух RC-цепочек, моделирующих процессы поляризации с образованием объемных емкостей:
Электрохимическая емкость двойного слоя , влияние которой наблюдается на более высоких частотах,
Емкость , связанная с интеркаляцией и массообменом лития, доминирующая на низких частотах.
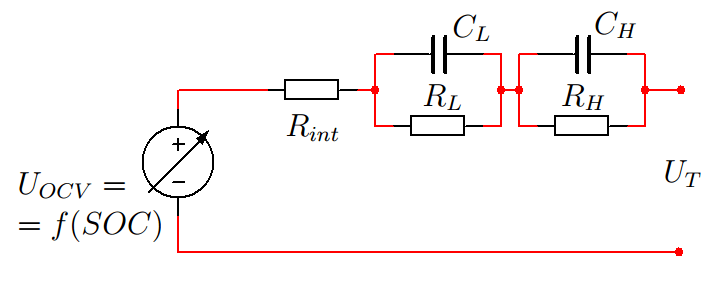
Рисунок 4. Схема замещения для динамической модели батареи второго порядка.
Таким образом, представленная на рисунке 4 динамическая модель второго порядка в пространстве состояний записывается в виде:
где , а параметры подбираются на основе экспериментальных данных, снятых с конкретного типа батареи.
В действительности, импеданс батареи является функцией от температуры и SOC, а в долгосрочном масштабе времени – также меняется при старении батареи.
Внутреннее активное сопротивление уменьшается при повышении температуры, но в пределах диапазона 25-40°C, оно остается достаточно стабильным . Эксперименты, проведенные в с полимерными литий-ионными аккумуляторами, показали, что параметры схемы замещения остаются постоянным при SOC больше 20%. При меньших значениях SOC происходит экспоненциальное увеличение сопротивлений и экспоненциальное уменьшение емкостей .
2.1.3 Моделирование состояния заряда.
Поскольку величина SOC изменяется в процессе заряда и разряда батареи, то естественно рассматривать SOC как еще одно состояние системы, добавив в схему замещения фрагмент для его моделирования.
Полная схема замещения представлена на рисунке 5. В схему добавлена изолированная цепь с управляемым источником током, обеспечивающим ток через и , равный току в цепи батареи . Таким образом осуществляется разряд и заряд емкости , моделирующей емкость батареи. Напряжение на емкости численно равно SOC, . Значение емкости определяется следующим образом :
где – полная емкость аккумулятора в Ач, – корректирующий множитель для учета зависимости емкости батареи от температуры , – корректирующий множитель для моделирования процесса старения ( – число циклов заряда-разряда).

Рисунок 5. Полная схема замещения для динамической модели второго порядка.
Сопротивление моделирует саморазряд батареи.
С учетом введенного фрагмента схемы, модель батареи в пространстве состояний дополняется еще одним уравнением для переменной :
Собственно задача определения SOC сводится к синтезу наблюдателя для модели (3)-(4).
2.2 Физические модели.
Некоторые исследователи предлагают использовать физические модели для предсказания SOC и SOH. Данный класс моделей основан на использовании уравнений, описывающих электрохимические процессы в батарее.
Главное преимущество такого подхода достаточно очевидно – достигается высокая точность моделирования за счет перехода с эмпирического на физический уровень описания модели. Недостатками являются высокая вычислительная сложность модели и большое количество параметров, подлежащих идентификации из экспериментальных данных. Несмотря на это, физические модели представляют достаточный интерес для будущих поколений систем управления батареями.
В литературе представлены два класса физических моделей:
Одночастичная модель (single particle model) -,
Одномерная пространственная модель (1D-spatial model) .
Одночастичная модель основана на допущении, что каждый из электродов литий-ионного элемента может рассматриваться как одна сферическая частица достаточно большого радиуса (чтобы ее площадь поверхности соответствовала площади пористого катода или анода батареи). Изменение концентрации и потенциала в электролите игнорируется, как и температурные эффекты.
Одномерная пространственная модель является дальнейшим развитием одночастичной модели, в которой каждый из электродов моделируется в виде множества пересекающихся сфер с центрами на одной линии. Такой подход позволяет более точно описать процесс интеркаляции (диффузии) ионов лития в пористые электроды батареи.
Заметим, что даже такие приближенные физические модели литий-ионных батарей основаны на уравнениях в частных производных и синтез наблюдателей для подобного рода объектов представляет собой отдельную нетривиальную задачу.
2.2.1 Одночастичная модель.
Одночастичная модель основана на моделировании следующих явлений в батарее: диффузия ионов лития в электроды и электрохимическая кинетика потока ионов. Процессы в электролите (жидкой фазе) представляются в виде постоянной проводимости и фактически не моделируются. Схематическая структура батареи в одночастичной модели показана на рисунке 6. Далее мы кратко воспроизведем основные составляющие модели. Все уравнения предполагаются одинаково удовлетворяющие как условиям реакции на аноде, так и в равной степени на катоде (с соответствующими параметрами).

Рисунок 6. Схематическое представление аккумулятора в одночастичной модели.
Интеркаляция лития в электроды моделируется как диффузия, описываемая законом Фика:
где – концентрация ионов лития в электродах (твердой фазе), – коэффициент диффузии.
Это уравнение может быть переписано в сферических координатах
с граничными условиями
Молярные потоки диффузии могут быть выражены как плотность тока через поверхность электродов:
где – постоянная Фарадея, – эффективная площадь поверхности каждого электрода.
Для оценки состояния заряда аккумулятора, удобно перейти от локальных концентраций к усредненным по всему объему электродов – :
Непосредственные вычисления показывают , что производная по времени находится как
где – коэффициент пропорциональности, – ток батареи.
Электрохимическая кинетика моделируется с помощью уравнения Батлера-Фольмера (Butler-Volmer equation) для молярного потока ионов лития:
в котором перенапряжения могут быть выражены следующим образом
где – потенциалы положительного и отрицательного электродов, – функция от концентрации ионов лития на поверхности электродов, – сопротивление электролита (жидкой фазы) и пассивной пленки на электроде, – универсальная газовая постоянная, – температура батареи.
Уравнение (7) может быть решено относительно перенапряжения с учетом, что потоки выражаются через ток батареи с помощью (5):
где – константы, выражающие плотность обменного тока.
Заметим, что напряжение на контактах батареи равно разности потенциалов , при этом потенциалы могут быть выражены через (8) с помощью подстановки (9). Отсюда, получаем искомое
Уравнения (6) и (10) составляют электрохимическую одночастичную модель литий-ионного аккумулятора.
2.2.2 Связь между одночастичной моделью и схемой замещения.
Концентрации для положительного электрода и отрицательного связаны друг с другом из уравнения (6): при увеличении , концентрация пропорционально уменьшается, и наоборот. Очевидно, что состояние заряда пропорционально концентрации . Тогда можно ввести в рассмотрение величину как состояние системы, при этом концентрации и будут линейно зависеть от : , .
Отсюда можно записать следующее уравнение для в одночастичной модели
где – некоторая положительная константа.
Слагаемое в (10), исходя из введенного состояния , от которого линейно зависят от концентрации и , может быть представлено в виде некоторой функции . В работе предложена следующая аппроксимация для :
Оставшаяся часть (10) представляет собой функцию от тока , для которой в предложена такая параметризация:
где – постоянные коэффициенты, идентифицируемые по экспериментальным данным.
Модель в пространстве состояния окончательно получается в виде:
(12)
Сопоставляя (4) и (11), достаточно очевидно, что уравнение состояния заряда в одночастичной модели (11) полностью аналогично представлению схемой замещения (4), при этом саморазряд батареи не моделируется. Из уравнения в (12) следует, что функции соответствует функция для напряжения холостого хода в схеме замещения. Но при этом в одночастичной модели существует дополнительный нелинейный элемент с падением напряжения , включенный последовательно с внутренним активным сопротивлением . В отличие от эмпирического представления схемой замещения, электрохимическая емкость двойного электрического слоя не моделируется в одночастичной модели.
Сама электрохимическая одночастичная модель может быть представлена в виде схемы замещения, показанной на рисунке 7.

Рисунок 7. Эквивалентная схема замещения для одночастичной модели.
Заключение.
В настоящей работе дан обзор двух вариантов моделей литий-ионных аккумуляторов для систем управления батареями. Показано, что эмпирическая модель на основе схемы замещения является самой распространенной в литературе, простой для реализации и гибкой с точки зрения масштабирования для моделирования специальных явлений в аккумуляторе. Параметры модели являются нестационарными, подверженными как процессу старению батареи, так и вариации от состояния заряда и температуры. На основе анализа последних публикаций сделан вывод, что перспективным направлением совершенствования моделей для нового поколения систем управления батарей является физические модели, количественно описывающие электрохимические явления в аккумуляторе. Показано, что одночастичная электрохимическая модель может быть представлена в виде схемы замещения, имеющей сходство с эмпирической моделью.
Библиографический список
- Ramadesigan V. et al. Modeling and simulation of lithium-ion batteries from a systems engineering perspective //Journal of The Electrochemical Society. – 2012. – Т. 159. – №. 3. – С. R31-R45
- Гаранжа A. В Китае изготовлена самая большая в мире аккумуляторная батарея [Электронный ресурс] / A. Гаранжа – Режим доступа: http://www.liotech.ru/sectornews_207_503 – Загл. с экрана.
- Axcom Battery Technology GmbH, CNFJ-500 2V/500Ah product specification [Электронный ресурс] – Режим доступа: http://www.axcom-battery-technology.de/uploads/media/Lead_Crystal_Battery_CY2-500.pdf – Загл. с экрана
- Pistoia G. (ed.). Lithium-Ion Batteries: Advances and Applications. – Newnes, 2013. – 634 p.
- Lithium Ion Rechargeable Batteries: Technical Handbook, Sony Corporation [Электронный ресурс] – Режим доступа: http://www.sony.com.cn/products/ed/battery/download.pdf – Загл. с экрана.
- Выравнивание параметров секций аккумулятора обеспечивает дополнительное время работы и увеличивает срок службы аккумуляторных батарей [Электронный ресурс] – Режим доступа: http://www.scanti.ru/bulleten.php?v=211&p=44 – Загл. с экрана
- Rahimi-Eichi H., Ojha U., Baronti F., Chow M. Battery Management System: An Overview of Its Application in the Smart Grid and Electric Vehicles // Industrial Electronics Magazine, IEEE — June 2013. — vol.7, no.2, — pp.4-16
- Chen M., Rincon-Mora G. A. Accurate electrical battery model capable of predicting runtime and IV performance //Energy conversion, ieee transactions on. — 2006. — Т. 21. — №. 2. — С. 504-511.
- V. Pop, H.J. Bergveld, D. Danilov, P.P.L. Regtien, P.H.L. Notten, Battery Management Systems: Accurate State-of-Charge Indication for Battery-Powered Applications. ISBN: 978-1-4020-6944-4, In: Philips Research Book Series, vol. 9, Springer, 2008. pp. 24?37.
- Melentjev S., Lebedev D. Overview of Simplified Mathematical Models of Batteries. // 13th International Symposium “Topical problems of education in the field of electrical and power engineering”. — Doctoral school of energy and geotechnology: Parnu, Estonia, January 14-19, 2013. — pp. 231-235
- Tremblay O., Dessaint L. A. Experimental validation of a battery dynamic model for EV applications // World Electric Vehicle Journal. — 2009. — Т. 3. — №. 1. — С. 1-10.
- Боченин В.А., Зайченко Т.Н. Исследование и разработка модели Li-Ion аккумулятора // Научная сессия ТУСУР–2012: Материалы Всероссийской научно-технической конференции студентов, аспирантов и молодых ученых, Томск, 16–18 мая 2012 г. – Томск: В-Спектр, 2012 – Том 2. – с 174-177.
- Weng C., Sun J., Peng H. An Open-Circuit-Voltage Model of Lithium-Ion Batteries for Effective Incremental Capacity Analysis //ASME 2013 Dynamic Systems and Control Conference. – American Society of Mechanical Engineers, 2013. DSCC2013-3979 – С. 1-8.
- Tang X. et al. Li-ion battery parameter estimation for state of charge //American Control Conference (ACC), 2011. – IEEE, 2011. – С. 941-946.
- Zhao J. et al. Kinetic investigation of LiCOO2 by electrochemical impedance spectroscopy (EIS) //International Journal of Electrochemical Science. – 2010. – Т. 5. – №. 4. – С. 478-488.
- Jiang Y. et al. Modeling charge polarization voltage for large lithium-ion batteries in electric vehicles //Journal of Industrial Engineering & Management. – 2013. – Т. 6. – №. 2. – С. 686-697.
- Rahmoun A., Biechl H. Modelling of Li-ion batteries using equivalent circuit diagrams //PRZEGLAD ELEKTROTECHNICZNY. – 2012. – Т. 88. – №. 7 B. – С. 152-156.
- He H., Xiong R., Fan J. Evaluation of lithium-ion battery equivalent circuit models for state of charge estimation by an experimental approach //energies. – 2011. – Т. 4. – №. 4. – С. 582-598.
- Wang C., Appleby A. J., Little F. E. Electrochemical impedance study of initial lithium ion intercalation into graphite powders //Electrochimica acta. – 2001. – Т. 46. – №. 12. – С. 1793-1813.
- Lee J., Nam O., Cho B. H. Li-ion battery SOC estimation method based on the reduced order extended Kalman filtering //Journal of Power Sources. – 2007. – Т. 174. – №. 1. – С. 9-15.
- Johnson V. H., Pesaran A. A., Sack T. Temperature-dependent battery models for high-power lithium-ion batteries. – City of Golden: National Renewable Energy Laboratory, 2001.
- Hu X., Li S., Peng H. A comparative study of equivalent circuit models for Li-ion batteries //Journal of Power Sources. – 2012. – Т. 198. – С. 359-367.
- Santhanagopalan S., White R. E. Online estimation of the state of charge of a lithium ion cell //Journal of Power Sources. – 2006. – Т. 161. – №. 2. – С. 1346-1355.
- Rahimian S. K., Rayman S., White R. E. Comparison of single particle and equivalent circuit analog models for a lithium-ion cell //Journal of Power Sources. – 2011. – Т. 196. – №. 20. – С. 8450-8462.
- Bartlett A. et al. Model-based state of charge estimation and observability analysis of a composite electrode lithium-ion battery //Decision and Control (CDC), 2013 IEEE 52nd Annual Conference on. – IEEE, 2013. – С. 7791-7796.
- Moura S. J., Chaturvedi N. A., Krstic M. Adaptive Partial Differential Equation Observer for Battery State-of-Charge/State-of-Health Estimation Via an Electrochemical Model //Journal of Dynamic Systems, Measurement, and Control. – 2014. – Т. 136. – №. 1. – С. 011015.
- Klein R. et al. State estimation of a reduced electrochemical model of a lithium-ion battery //American Control Conference (ACC), 2010. – IEEE, 2010. – С. 6618-6623.
- Fang H. et al. Adaptive estimation of state of charge for lithium-ion batteries //American Control Conference (ACC), 2013. – IEEE, 2013. – С. 3485-3491.
В последние годы популярность обрели так называемые "разумные" аккумуляторы, или иными словами Smart batteries. Аккумуляторы этой группы оснащаются микропроцессором, способным не только обеспечивать обмен данными с зарядным устройством, но и регулировать работу аккумуляторных батарей, информировать пользователя о степени их работоспособности. Аккумуляторы, комплектуемые специализированной системой интеллектуального регулирования, находят широкое применение в самом разном техническом электрооборудовании, включительно и электротранспортном. Примечательно, что группу интеллектуальных батарей образовывают преимущественно литийсодержащие аккумуляторы, хоть и встречаются среди них герметизированные или вентилируемые свинцово-кислотные, никель-кадмиевые.
Разумные батареи, как минимум, на 25% дороже обычных аккумуляторов. Однако интеллектуальные аккумуляторы отличаются не только ценой, как большинство предполагает, но и особенностями прилагаемого к ним регулировочного устройства. Последнее гарантирует идентификацию типа аккумуляторных батарей с зарядным устройством, отслеживает температуру, напряжение, ток, степень заряда аккумуляторов. Значительная часть литий-ионных батарейных модулей имеет встроенную систему мониторинга и управления (BMS ), которая отвечает за состояние аккумуляторов и управляет ими таким образом, чтобы максимально сохранить работоспособность аккумуляторных батарей в различных условиях.
Рассмотрим же более подробно, что такое аккумуляторная батарея с BMS. Разумные батареи - это аккумуляторы, оборудованные специальной микросхемой, в которой запрограммированы постоянные и временные данные. Постоянные данные программируются ещё на заводе-изготовителе и не подлежат изменению: данные, касаемые производственной серии BMS, её маркировки, совместимости с типом аккумуляторных батарей, вольтажа, максимальных и минимальных пределов напряжения, температурных границ. Временные же данные – это данные, подлежащие периодическому обновлению. К ним относятся преимущественно эксплуатационные требования и пользовательские данные. Как правило, предусматривается возможность подключения системы управления и балансировки к компьютеру или контроллеру с целью мониторинга состояния батарей и контроля их параметров. Некоторые модели BMS могут настраиваться под разные типы батарей (уровни их напряжения, значения тока, емкость).

Система управления батареи (BMS) – электронная система, которая управляет заряд/разрядным процессом аккумуляторной батареи, отвечает за безопасность её работы, проводит мониторинг состояния батареи, оценку вторичных данных работоспособности.
BMS (Battery Management System) – это электронная плата, которая ставится на аккумуляторную батарею с целью контроля процесса её заряда/разряда, мониторинга состояния аккумулятора и его элементов, контроля температуры, количества циклов заряда/разряда, защиты составных аккумуляторной батареи. Система управления и балансировки обеспечивает индивидуальный контроль напряжения и сопротивления каждого элемента аккумулятора, распределяет токи между составными аккумуляторной батареи во время зарядного процесса, контролирует ток разряда, определяет потерю емкости от дисбаланса, гарантирует безопасное подключение/отключение нагрузки.
На основе получаемых данных BMS выполняет балансировку заряда ячеек, защищает аккумулятор от короткого замыкания, перегрузки по току, перезаряда, переразряда (высокого и чрезмерно низкого напряжения каждой ячейки), перегрева и переохлаждения. Функциональность BMS позволяет не только улучшить режим эксплуатации аккумуляторных батарей, но и максимально увеличить срок их службы. При определении критического состояния батареи Battery Management System соответственно реагирует, выдавая запрет на использование аккумуляторной батареи в электросистеме - отключает её. В некоторых моделях BMS предусмотрена возможность ведения реестра (записи данных) о работе аккумуляторной батареи и их последующей передачи на компьютер.

Литий-железо-фосфатные аккумуляторы (известные как LiFePO4), что существенно превосходят ряд иных аккумуляторный батареи литий-ионной технологии с точки зрения безопасности, стабильности и производительности, также комплектуются схемами управления BMS. Дело в том, что литий-железо-фосфатные батареи чувствительны к перезаряду, а также разряду ниже определенного напряжения. С целью уменьшения риска повреждения отдельных аккумуляторных ячеек и выхода батареи в целом из строя все LiFePO4 аккумуляторы оснащаются специальной электронной схемой балансировки – системой управления батареями (BMS).
Напряжение на каждой из ячеек, объединенных в литий-железо-фосфатную батарею, должно находиться в определенных пределах и быть равным между собой. Ситуация же такова, что идеально равная емкость всех ячеек, входящих в состав единого аккумулятора, - довольно редкое явление. Даже малое различие на пару долей ампер-часов может спровоцировать в дальнейшем различие уровня напряжения при зарядно/разрядном процессе. Разница в уровне заряда/разряда ячеек единой LiFePO4 батареи довольно опасна, так как может погубить аккумулятор.
При параллельном соединении ячеек напряжение на каждой из них будет приблизительно равным: более заряженные элементы смогут вытягивать менее заряженные. При последовательном же соединении равномерного распредения заряда между ячейками не происходит, в результате чего одни элементы остаются недозаряженными, а другие перезаряжаются. И даже, если общее напряжении по завершении зарядного процесса будет близко к идеальному, вследствиедаже небольшогоперезаряда некоторых ячеек в батарее будут происходить необратимые разрушительные процессы. Аккумуляторная батарея в процессе эксплуатации не будет отдавать требуемой емкости, и по причине неравномерного распредения заряда быстро придет в негодность. Ячейки с наименьшим уровнем заряда станут своеобразным "cлабым местом" аккумулятора: они будут быстро поддаваться разряду, в то время, когда аккумуляторные элементы большей емкости будут проходить только частичный разрядный цикл.
Избежать негативных разрушительных процессов в аккумуляторной батарее позволяет метод балансировки. Система управления и балансировки ячеек BMS следит за тем, чтобы все ячейки в конце зарядки получали равное напряжении. При подходе зарядного процесса к концу BMS делает балансировку шунтированием зарядившихся ячеек или же переносит энергию элементов с большим напряжением к элементам с меньшим напряжением. В отличии от активной, при пассивной балансировке практически полностью восполнившие заряд ячейки получают меньший ток или исключаются из зарядного процесса до момента, пока все элементы аккумулятора не будут иметь равный уровень напряжения. Система управления батареей (BMS), производя балансировку, а также обеспечивая контроль температуры и выполнение ряда иных функций, максимально продлевает срок службы аккумулятора.
Обычно магазины продают уже готовые сборные аккумуляторные батареи с BMS, однако некоторые магазины и фирмы все же предоставляют возможность приобретения аккумуляторных составных по отдельности. К их числу относится и фирма «Электра». Электра – первая фирма в Украине, решившаяся на поставку и создание рынка аккумуляторных элементов для самостоятельной сборки и конструирования литий-железо-фосфатных аккумуляторных батарей (LiFePO4) в нашей стране. Главное преимущество самостоятельной сборки батарей из отдельных ячеек состоит в возможности получения сборного аккумуляторного комплекта максимально приближенного к запросам пользователя с точки зрения рабочих параметров и емкости. При покупке комплектующих для сборки LiFePO4 батареи важно обращать внимание не только на соответствие аккумуляторных ячеек между собой, но и смотреть на параметры BMS : напряжение, ток разряда, количество ячеек, на которое она рассчитана. Эксплуатация литий-железо-фосфатной аккумуляторной батареи также предусматривает использование исключительно зарядного устройства, отвечающего ей по типу. Его напряжение должно быть равным общему напряжению аккумуляторной батареи.

24v 36v 48v 60v
Основные цели применения BMS(BatteryManagementSystem) в качестве регулятора работы аккумуляторной батареи:
Защита аккумуляторных клеток и целой батареи от повреждений;
Увеличение срока службы батареи;
Поддержание аккумулятора в состоянии, при котором станет максимально возможным выполнение всех возложенных на него задач.
ФункцииBMS (Battery Management System)
1. Контроль за состоянием элементов аккумуляторной батареи с точки зрения:
- напряжения: общее напряжение, напряжение отдельных ячеек, минимальное и максимальное напряжение ячейки;
- температуры: средняя температура, температура электролита, температура на выходе, температура отдельных аккумуляторных "клеток", платы BMS (электронная плата, как правило, оснащается как внутренними температурными датчиками, проводящими мониторинг температуры непосредственно регулировочного устройства, так и внешними, которые используются для контроля температуры конкретных элементов батареи);
- заряда и глубины разряда;
- токов заряда /разряда;
- исправности
Система управления и балансировки ячеек может хранить в памяти такие показатели, как количество циклов заряда/разряда, максимальное и минимальное напряжение ячеек, максимальное и минимальное значение тока заряда и разряда. Именно эти данные и позволяют определять состояние исправности аккумуляторной батареи.
Неправильный заряд – одна из наиболее распространенных причин выхода аккумуляторной батареи из строя, поэтому контроль заряда является одной из основных функций микроконтроллера BMS.
2. Интеллектуально-вычислительная. На основе вышеперечисленный пунктов BMS проводит оценку:
Максимального допустимого тока заряда;
Максимального допустимого тока разряда;
Количества энергии, поставляемой вследствие зарядки, или же теряемой при разряде;
Внутреннего сопротивления ячейки;
Суммарной наработки аккумуляторной батареи в процессе эксплуатации (общего количества циклов работы).
3. Связная. BMS может подавать вышеуказанные данные на внешние управляющие устройства путем проводной или же беспроводной коммуникации.
4. Защитная. BMS защищает батарею, предотвращая её выход за пределы безопасной работы. BMS гарантирует безопасность подключения/отключения нагрузки, гибкое управление нагрузкой, защищает аккумуляторную батарею от:
Перегрузки по току;
Перенапряжения (во время зарядки);
Падения напряжения ниже допустимого уровня (во время разряда);
Перегрева;
Переохлаждения;
Утечки тока.
BMS может предотвратить опасный для аккумуляторной батареи процесс путем непосредственного влияния на неё или же подачи соответствующего сигнала о невозможности последующего использования аккумулятора к управляющему устройству (контроллеру). Система интеллектуального мониторинга (BMS) отключает аккумуляторную батарею от нагрузки или зарядного устройства при выходе хотя бы одного из рабочих параметров за границы допустимого диапазона.
5. Балансировка. Балансировка – это метод равномерного распределения заряда между всеми ячейками аккумуляторной батареи, благодаря чему максимально продлевается срок службы аккумулятора.
BMS предотвращает чрезмерный перезаряд, недозаряд и неравномерный разрядный процесс в отдельных аккумуляторных ячейках:
Осуществляя "перетасовку" энергии от наиболее заряженных клеток к менее заряженным (активная балансировка);
Снижая до достаточного низкого уровня поступление тока к практически полностью заряженной ячейке, одновременно с тем, когда менее заряженные аккумуляторные клетки продолжают получать нормальный зарядный ток (принцип шунтирования),
Обеспечивая процесс модульной зарядки;
Регулируя выходные токи ячеек аккумулятора, подключенного к электроустройству.
С целью защиты платы BMS от негативного воздействия влаги и пыли её покрывают специальным эпоксидным герметиком.
Не всегда аккумуляторы имеет только одну систему управления и балансировки. Иногда вместо одной платы BMS, подсоединяемой при помощи выходящих проводов к аккумуляторной батарее и контроллеру, используется сразу несколько связанным между собой регулировочных электронных плат, каждая из которых управляет определенным количеством ячеек и подает выходящие данные к единому контроллеру.

С практической точки зрения BMS могут выполнять значительно больше функций, нежели просто управление работой батареи. Иног да эта электронная система может принимать участие в контроле параметров режима работы электрического транспортного средства, и осуществлять соответствующие действия по управлению его электрической мощностью. Если аккумуляторная батарея участвует в работе системы рекуперации энергии при торможении электрического транспортного средства, то BMS также может регулировать процесс подзарядки батареи при замедлении и спусках.
Военно-специальные науки Aeroballistic method of increasing of ballistic efficiency of the guided aviation bombs. Key words: distance of flight, guided aviation bomb, additional airfoil. Fomicheva Olga Anatolievna, candidate [email protected], Russia, Tula, Tula State University of technical science, docent, УДК 621.354.341 МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ РАЗОГРЕВА АККУМУЛЯТОРНОЙ БАТАРЕИ С ПОМОЩЬЮ ХИМИЧЕСКОГО НАГРЕВАТЕЛЬНОГО ЭЛЕМЕНТА Е.И. Лагутина В статье приведена математическая модель процесса поддержания аккумуляторной батареи в оптимальном тепловом состоянии в условиях низких температур окружающего воздуха за счет использования химического нагревательного элемента. Ключевые слова: термостатирование, конвективный теплообмен, аккумуляторная батарея, химический нагревательный элемент, математическая модель. На данном этапе развития вооружения и военной техники сложно себе представить успешное ведение боевых действий с минимальными собственными потерями без единой системы управления войсками. С учетом все возрастающей динамичности боевых действий основу системы управления войсками в тактическом звене управления составляют радиосредства. Такая роль радиосредств в системе управления в свою очередь заставляет особое внимание обращать и на элементы питания радиосредств – аккумуляторную батарею, как основу их бесперебойной работы. С учетом климатических особенностей нашей страны (наличие большого процента территорий с преимущественно холодным климатом, возможность успешного ведения боевых действий на некоторых операционных направлениях Дальнего Востока только в зимние месяцы) поддержание оптимального теплового режима работы аккумуляторной батареи в условиях низких температур окружающего воздуха является одной из важнейших задач. Именно ресурсосберегающие условия работы аккумуляторных батарей во многом определяют устойчивое функционирование системы связи, а, следовательно, и успешное выполнение боевых задач. 105 Известия ТулГУ. Технические науки. 2016. Вып. 4 На данный момент разработано достаточно много устройств термостатирования. Но общими недостатками для них, в основном, являются относительно большое энергопотребление (причем запитываются они от самой аккумуляторной батареи) и необходимость участия человека в управлении процессом термостатирования. Учитывая вышеперечисленные недостатки, в разрабатываемом устройстве термостатирования, в сочетании с теплоизолирующим корпусом, в качестве основного средства поддержания оптимального теплового режима работы аккумуляторной батареи предлагается использовать химический нагревательный элемент на основе перенасыщенного ацетата натрия трехводного NaCH3COO·3H2O с равновесной температурой фазового перехода Тф= 331 К и скрытой теплотой фазового перехода rт = 260 кДж/кг, который стабилен в условиях переохлаждения при введении небольших добавок и может переохлаждаться, по данным , до Т = 263 К. Проведенный патентный поиск показал наличие очень небольшого количества патентов с описанием тепловых аккумуляторов фазового перехода (ТАФП), использующих в качестве теплоаккумулирующих материалов (ТАМ) переохлажденные жидкости. Это свидетельствует о практическом отсутствии в данной области апробированных технических решений, позволяющих реализовать управляемый процесс отдачи ранее накопленной теплоты. Учитывая также, что удельная теплота фазового перехода выбранного ТАМ достаточно велика, и при этом он способен переохлаждаться до весьма низких значений температуры , то возникает необходимость провести самостоятельное расчетное исследование данного вещества с целью выявления его практической применимости. За основу для построения математической модели ТАФП взята задача Стефана, представляющая собой задачу о распределении температуры в теле при наличии фазового перехода, а также о местонахождении фаз и скорости движения границы их раздела. Для простоты мы рассмотрим плоскую задачу (когда поверхностью фазового перехода является плоскость). С классической точки зрения она является задачей математической физики и сводится к решению следующих уравнений : 2 dT1 2 d T1 = a1 . для 0 < x < ξ, 2 dτ dx 2 dT2 2 d T2 = a2 . для ξ < x < ∞, dτ dx 2 с дополнительными условиями T1 = C1 = const < Tф при x = 0, T2 = C = const > Tф и условиями фазового перехода 106 при τ = 0, (1) (2) (3) (4) Известия ТулГУ. Технические науки. 2016. Вып. 4 2. В обратимых процессах фазового перехода ТАМ плавлениекристаллизация при τ=0 границы раздела фаз сформированы, температурное поле ТАМ в растущей фазе линейно, а температура исчезающей фазы равна температуре фазового перехода. 3. Теплопроводность ТАМ в продольном направлении отсутствует. 4. Процесс фазового превращения ТАМ принимается одномерным. При этом границы раздела фаз неизменны по форме и в каждый момент времени представляют собой цилиндрические поверхности, расположенные концентрично по отношению к стенкам корпуса химического нагревательного элемента. 5. Тепловые потери в окружающую среду от ТАФП в процессе его разрядки и на нагрев соседних с корпусом аккумулятора деталей радиостанции не учитываются. 6. Коэффициенты переноса (теплоотдачи, теплопередачи, теплопроводности) и удельные теплоемкости постоянны и не зависят от температуры. Процесс конвективного теплообмена ТАМ со стенками корпуса химического нагревательного элемента описывается уравнением q раз (τ) = ак ⋅ Fк (Tтам (τ) − Tк (τ)) , (11) где qраз(τ) – тепловая мощность, отдаваемая корпусу химического нагревательного элемента, Вт; ак – коэффициент теплоотдачи от ТАМ к корпусу химического нагревательного элемента, Вт/(м2·К); Fк –площадь соприкосновения ТАМ с внутренней стенкой корпуса химического нагревательного элемента, м2; Ттам(τ) – температура теплоаккумулирующего материала, К; Тк(τ) – температура стенки корпуса химического нагревательного элемента, К. При τ>0 справедливы следующие уравнения: Tф − Т там (τ) q раз (τ) = λтв ⋅ ⋅ Fк, (12) т z (τ) dz (τ) q раз (τ) = ρ тв ⋅ r ⋅ ⋅ Fк, (13) т r d (τ) где λтв т – коэффициент теплопроводности ТАМ в твердой фазе, Вт/(м·К); z(τ) – толщина кристаллизовавшегося слоя ТАМ в момент времени τ, м; 3 ρ тв т – плотность ТАМ в твердой фазе, кг/м. Принятое допущение об описании теплового состояния корпуса химического нагревательного элемента по его средней температуре дает возможность не рассчитывать локальные скоростные поля и коэффициенты теплоотдачи в различных точках. Тогда при τ>0 справедливо следующее уравнение: q раз (τ) = а т ⋅ Fт (Tтам (τ) − Tк (τ)) , (14) 108 Военно-специальные науки где ат – коэффициент теплоотдачи от аккумулирующего материала к поверхности теплообмена, Вт/(м2·К); Fт – площадь поверхности теплообмена, м2; Учитывая, что подводимая к корпусу химического нагревательного элемента теплота идёт на увеличение его внутренней энергии и на теплопотери в корпус батареи, при τ>0 имеет место следующее уравнение: dT (τ) q раз (τ) = Ск ⋅ к + ав ⋅ Fв (Tв (τ) − T0) , (15) dτ где Ск – общая теплоемкость корпуса химического нагревательного элемента, соприкасающегося с корпусом батареи, Дж/К; ав – коэффициент теплоотдачи от стенок химического нагревательного элемента к поверхности батареи, Вт/(м2·К); Fв – площадь поверхности корпуса химического нагревательного элемента, соприкасающегося с корпусом батареи, м2; Т0 – начальная температура батареи, К. Последним уравнением, описывающим процесс функционирования системы ТАФП – корпус аккумуляторной батареи при τ>0, является балансовое уравнение: q раз (τ) = ав ⋅ Ск ⋅ (Tк (τ) − Tв (τ)) . (16) Система уравнений (11 – 16) представляет собой математическую модель функционирования системы разогрева корпуса аккумуляторной батареи в период разрядки ТАФП. Неизвестными функциями в ней являются qраз(τ), z(τ), Тк(τ), ТВ(τ), Ттам(τ). Поскольку число неизвестных функций равно числу уравнений, то данная система замкнута. Для её решения в рассматриваемом случае сформулируем необходимые начальные и граничные условия: q раз (0) = 0 0 ≤ z (τ) ≤ δ ; z (0) = 0 т (17) Tк (0) ≈ Tф TБ (0) = Tв (0) = Tтам (0) = T0 где δ т – толщина корпуса батареи, м; ТБ – температура батареи в момент времени τ, К. Путем алгебраических преобразований уравнений (11 – 17) получаем систему, состоящую из двух дифференциальных уравнений: E − D ⋅ Tк (τ) dz (τ) (18) = , dτ N ⋅ (W + B ⋅ z (τ)) dTк (τ) E − D ⋅ Tк (τ) = − I ⋅ Tк (τ) + M , (19) dτ Z + Y ⋅ z (τ) где B, W, D, E, I, M, N, Z, Y – некоторые константы, рассчитываемые по формулам (20 – 28): B = ав ⋅ а т ⋅ Fв ⋅ Fц, (20) 109 Известия ТулГУ. Технические науки. 2016. Вып. 4 W = (a т ⋅ Fк + ав ⋅ Fв) ⋅ λтв т ⋅ Fк, D = B ⋅ λтв т ⋅ Fк, E = D ⋅ Tф, a ⋅F I= Б Б, CБ M = I ⋅ T0 , (21) (22) (23) (24) (25) (26) N = ρ тв т ⋅ rr ⋅ Fк, Z = W ⋅ CБ, (27) Y = B ⋅ CБ. (28) 2 где aБ – коэффициент температуропроводности батареи, м /с, FБ – площадь поверхности батареи, соприкасающейся с химическим нагревательным элементом, м2; СБ – теплоемкость батареи, Дж/К. Анализируя систему дифференциальных уравнений можно сделать вывод об их нелинейности. Для решения этой системы с начальными и граничными условиями целесообразно воспользоваться численными методами, например, методом Рунге-Кутта четвертого порядка, реализуемым с помощью компьютерной программы Mathcad для Windows. Список литературы 1. Исследование возможности применения переохлажденных жидкостей в качестве теплоаккумулирующих материалов в фазопереходных тепловых аккумуляторах, устанавливаемых на мобильные машины для предпускового разогрева их двигателей зимой: отчет о НИР (итоговый) / Воен. инж.-техн. ун-т; рук. В.В. Шульгин; отв. исполн.: A.Г. Мелентьев. СПб., 2000. 26 с. № 40049-Л. Инв. №561756-ОФ. 2. Булычев В.В., Челноков B.C., Сластилова С.В. Накопители тепла с фазовым переходом на основе Al-Si-сплавов //Известия высших учебных заведений. Черная металлургия. № 7. 1996. С. 64-67. 3. Исследование возможности применения переохлажденных жидкостей в качестве теплоаккумлирующих материалов в фазопереходных тепловых аккумуляторах, устанавливаемых на мобильные машины для предпускового разогрева их двигателей зимой: отчет о НИР (промежуточ. по этапу №3) / Воен. инж.-техн. ун-т; рук. В.В. Шульгин; отв. исполн.: A.Г. Мелентьев. СПб., 2000. 28 с. № 40049-Л. Инв. № 561554-ОФ. 4. Патанкар С. В., Сполдинг Д. Б. Тепло- и массообмен в пограничных слоях / под ред. акад. АН БССР А.В. Лыкова. М.: Энергия, 1971. 127 с. 5. Mathcad 6.0 PLUS. Финансовые, инженерные и научные расчеты в среде Windows 95/ перевод с англ. М.: Информационно-издательский дом «Филинъ», 1996. 712 с. 110 Военно-специальные науки Лагутина Елизавета Игоревна, адъюнкт кафедры радио, радиорелейной, тропосферной, спутниковой и проводной связи, [email protected], Россия, Рязань, Рязанское высшее воздушно-десантное командное училище MATHEMATICAL MODEL OF FUNCTIONING SYSTEM WARMING UP THE BATTERY WITH USING A CHEMICAL HEATING ELEMENT E.I. Lagutina In the article, the mathematical model of the process of maintaining the battery in optimum thermal condition at low ambient temperatures using a chemical heating element. Key words: temperature control, convective heat transfer, battery, chemical heating element, mathematical model. Lagutina Elizaveta Igorevna, adjunct of the department of radio, radio relay, tropospheric, satellite and wire line communication, [email protected], Russia, Ryazan, Ryazan higher airborne command school УДК 62-8 СРАВНИТЕЛЬНЫЙ АНАЛИЗ МАТЕМАТИЧЕСКИХ МОДЕЛЕЙ ГАЗОДИНАМИЧЕСКИХ ПРОЦЕССОВ В ПРОТОЧНОМ ОБЪЕМЕ А.Б. Никаноров В работе проведен сравнительный анализ с определением области целесообразного применения математических моделей газодинамических процессов в проточных объемах, полученных на основе законов сохранения массы, энергии и количеств движения, полученных для среднеинтегральных параметров среды. Ключевые слова: воздушно-динамический рулевой привод, закон сохранения, математическая модель, силовая система, проточный объем. В работе был рассмотрен подход к построению моделей газодинамических процессов на базе основных законов сохранения для среднеинтегральных по объему и поверхности термодинамических функций и параметров. Получена математическая модель для газодинамических процессов в проточном объеме. В данной статье рассматриваются модели следующего уровня идеализации: 1. Модель квазистатических процессов в проточном объёме для среднеинтегральных термодинамических функций и параметров. Рассмотрим процесс, протекающий в объеме w0 (рис. 1), при этом полагая его квазистатическим, то есть полагая, что скорость движения газа в объеме также, как скорость механического процесса деформации контрольной поверхности пренебрежимо мала по сравнению со скоростями переноса среды через контрольную поверхность объема. 111
анализ и систематизация методов и моделей расчета характеристик АБ;
формализация методики обработки и анализа статистических данных и имитационных экспериментов по анализу характеристик разряда;
разработка имитационной модели нестационарного движения электромобиля;
разработка методики интеграции разнородных компонентов ЭМ;
постановка и решение задач оптимизации на имитационной модели.
агрегированное процессное представление имитационной модели нестационарного движения ЭМ;
модели нестационарных случайных процессов динамики движения ЭМ и заряда/разряда АБ;
модели классификации типов АБ и задачи выбора типов для заданных характеристик движения ЭМ;
программная реализация имитационной модели ЭМ;
алгоритмы оптимизации на имитационной модели ЭМ.
на республиканских и межрегиональных научно-технических конференциях, симпозиумах и семинарах (2003-2009 гг.);
на заседании кафедры «Электротехника и электрооборудование» МАДИ (ГТУ).
методы описания семейства разрядных кривых – зависимость U =f(I , t ) при заданном постоянном значении температуры (T =const);
вычисление максимального времени разряда (ёмкости батареи) в зависимости от тока разряда ;
методы упрощённого расчёта нестационарного разряда АБ, т.е. разряда при изменяющемся во времени разрядном токе или потребляемой мощности [t m =f(I ), I =var или t m =f(P) P =var];
определение момента окончания разряда АБ на данном токе, что находит применение не только при моделировании ЭМ, но и в системе управления АБ непосредственно на борту ЭМ;
комплексные методы, определяющие зависимости U =f(I , t , T ) и t m =f(I ).
пробег (запас хода);
расход энергии при движении;
расход энергии на единицу пути и грузоподъёмности;
удельная энергия, отданная батареей.
параметры батареи и (или) накопителя энергии: семейство временных разрядных и зарядных характеристик для значений тока в рабочем диапазоне при постоянной температуре, масса батарейного модуля и дополнительного оборудования, количество устанавливаемых модулей и др.;
параметры электродвигателя: номинальные ток и напряжение, сопротивление якорной цепи и обмотки возбуждения, конструктивные данные, характеристика холостого хода и др.;
параметры базового автомобиля: полная масса, передаточные числа коробки передач и главной передачи, КПД трансмиссии, момент инерции и радиус качения колёс, коэффициент сопротивления воздуха, площадь обтекаемой поверхности, коэффициент сопротивления качению, грузоподъёмность и др.;
параметры режима движения.
Заряд двухступенчатым током 23А и 11,5А (рекомендуемый заводом- изготовителем аккумуляторных батарей)
Контрольный разряд (по рекомендации завода изготовителя) током 145А до минимального значения напряжения 9В.
Заряд до 20%,50% и 80% степеней заряженности токами 23,45 и 95А.
Разряд током 145А до минимального значения напряжения 9В.
Проведена классификация АБ и анализ известных методов расчета характеристик АБ. Дана оценка возможности их применения при моделировании нестационарного заряда и разряда АБ.
На основе проведенных в диссертации исследований для моделирования нестационарного нагружения АБ при различных режимах и условиях движения ЭМ предложено использование декомпозиционного подхода, который позволяет интегрировать гибридные аналитико-имитационные модели, включая модели механической части, системы управления, режимов движения и другие.
В работе поставлена и решена задача формализации принципов построения имитационной модели ЭМ с использованием процессного описания объектов и компонентов системы, позволяющая, имитировать нестационарные режимы движения ЭМ и их влияние на нестационарные характеристики нагружения АБ.
Проведен факторный анализ характеристик разгона, который показал, что уже три фактора объясняют 97% информации. Это позволило существенно сократить количество латентных факторов модели и тем самым размерность имитационной модели.
Разработана методика проведения эксперимента по сравнительному анализу характеристик разряда аккумуляторных батарей и проведены эксперименты. Полученные экспериментальные данные показали, что практически для всех зависимых переменных правомерно использование линейных моделей.
Проведенные имитационные эксперименты по оценке характеристик движения ЭМ показали, что нестационарный случайный процесс характеристик хорошо аппроксимируется процессом с гиперэкспоненциальной автоковариационной функцией. Получены аналитические выражения для описания характеристик условно-нестационарного процесса.
Для решения задач оптимизации на имитационной модели в качестве алгоритмов управления выбраны алгоритмы стохастической аппроксимации, которые обеспечивают высокую скорость сходимости в условиях больших дисперсий характеристик движения.
Разработан программно-моделирующий комплекс, который внедрен для практического применения в ряде предприятий, а также используется в учебном процессе в МАДИ(ГТУ).
Иоанесян А.В. Методы расчёта характеристик аккумуляторных батарей для электромобилей / Е.И.Сурин, А.В.Иоанесян // Материалы научно-методической и научно исследовательской конференции МАДИ (ГТУ). –М., 2003. – С.29-36.
Иоанесян А.В. Методы определения окончания разряда и заряда аккумуляторной батареи на электромобиле / Иоанесян А.В. // Электротехника и электрооборудование транспорта. – М.: 2006, №6 - стр. 34-37.
Иоанесян А.В. Основные параметры аккумуляторных батарей для электромобилей / А.В. Иоанесян // Методы и модели прикладной информатики: межвуз сб. науч. тр. МАДИ (ГТУ). – М., 2009. – С.121-127.
Иоанесян А.В. Модель механической части электромобиля / А.В. Иоанесян // Методы и модели прикладной информатики: межвуз сб. науч. тр. МАДИ (ГТУ). – М., 2009. – С.94-99.
Иоанесян А.В. Обобщенная имитационная модель движения электромобиля / А.В. Иоанесян // Принципы построения и особенности использования мехатронных систем: сб. науч. тр. МАДИ (ГТУ). – М., 2009. – С.4-9.
Иоанесян А.В. Модели нестационарных процессов движения электромобиля / А.В. Иоанесян // Принципы построения и особенности использования мехатронных систем: сб. науч. тр. МАДИ (ГТУ). – М., 2009. – С.10-18.
NiMH - . - . : , -.
MATHEMATICAL MODEL OF HYBRID ELECTRIC VEHICLE HIGH-VOLTAGE BATTERY IDENTIFICATION
S. Serikov, Associate Professor, Candidate of Technical Sciences, KhNAHU
Abstract. The mathematical model of hybrid electric vehicle NiMH high-voltage battery is obtained. This model allows to explore the interaction of vehicle tractive electric drive and high-voltage battery at the electric motive power motion and in the process of recuperation of braking kinetic energy. Key words: identification, mathematical model, high-voltage battery, electromotive force, internal re-sistance, state of charge, rated battery capacity.
(), - . - (). , .
- , . - - , -, -, - . - - - . - , - - . - - - . - - - , - - .
-, / 35300 70130 100200 140200 90120 150 100
-, /3 5090 60100 60100 100210 75110 160 100
, / 1545 3560 3060 5580 80120 100 150
300600 4001200 10001500 1000 250500 500 300
, ../ 70400 400500 500 150800 300 >1000 >1000
2,1 -. . -
()0,15 2,00TAB TAB AK
0,1TAB TAB TAB nomC C = = - ; TABC , - - ; TAB nomC - . -
2 % . 8 . 90 % 1 . - - - . - - - - (NiMH), -, -. - 1,2 BAKE = . - -
()TAB TAB AK TABE n E= ,
() ()() ()() ()()
8,2816 1 23,575 1
30,0 1 23,7053 1
12,588 1 4,131 1
0,8658 1 1,37 , B .
NiMH 5 % . 1 . - 60 % - 20 . - - (-, - ..). - -
3,5 BAKE = . - 10 % . 2 3 . - . . Toyota Prius III (- 2003 .) NiMH , 168 -, 28 , -
201,6 BTAB nomU = . Toyota Prius II (20002003 .) NiMH , 228 -, 38 .
273,6 BTAB nomU = . 6,5 TAB nomC = ,
max 80 ATAB disI = ,
max 50 ATAB chgI = .
TAB TAB TABTAB nom
0TAB - 0t = . - - (TABE) - (TABR),
TAB TAB TAB TABU E I R= . - , - . TABE TABR - , - (0TABt), - (TABI)
()0,TAB TAB TAB TABE f I t= ;()0,TAB TAB TAB TABR f I t= .
()TAB TAB TAB TAB TAB TAB TABP U I E I R I= = .
()21 42TAB TAB TAB TAB TABTABI E E R PR= . - maxTAB TABP P> , maxTABP - . -
TAB VD inv dop VD
0VD gnrP P= < ; dopP -, - ; inv . - - - . - - , - (- -
0,1...10 cSCT = .
1. , - .
()TAB TAB AK TABE n E=
0,46263 0,697080,41778 1,1516 , B ,
0,00352 0,25920,48776 1,1364 , B ,
()(),TAB TAB TABE f sign I= :
0,093727 1,197 , B , 0;
0,16112 1,2352 , B , 0.
TAB (0TABI) 0,018274Rdis = , (0TABI <) 0,0075985Rchg = . - - 228TABn = , - - , . 3.
NiMH Panasonic Toyota Prius, . , - . 5.
()(),TAB TAB TABE f sign I=
()32VD d d q qP i u i u= + du qi qu
()(),TAB TAB TABR f sign I=
VD TAB VD inv dop
NiMH . - - - - , . - - - .
1. James Larminie, John Lowry. Electric vehicle technology explained. John Wiley & Sons Ltd, The Atrium, Southern Gate, Chiches-ter, West Sussex PO19 8SQ, England. 2003. 296 p.
2. Dhameja, Sandeep. Electric vehicle battery systems / Sandeep Dhameja.Sandeep Dhameja. Newnes, 2002, 230 p.
3. K.J. Kelli, M. Mihalic, M. Zolot. Battery us-age and thermal performance of the Toyota Prius and Honda Insight for various chassis dynamometer test procedures. Preprint. NREL/CP-540-31306, November, 2001.
4. Loic Boulon, Daniel Hissel, Marie-Cecile Pera. Multi physics model of a nickel based battery suitable for hybrid electric vehicle simulation // Journal of Asian Electric Vehiclec, Vol. 6, No. 2, December 2008. . 1175-1179.
5. A H2 PEM Fuel Cell and High Energy Dense Battery Hybrid Energy Source for an Urban Electric Vehicle. N. Schofield, H. T. Yap, C. M. Bingham.
6. Yuanjun Huang, Chengliang Yin, Jianwu Zhang. Modeling and Development of the Real-time Control Strategy For Parallel Hybrid Electric Urban Buses / WSEAS
TRANSACTIONS on INFORMATION SCIENCE & APPLICATIONS. Issue 7, Volume 5, July 2008. . 11131126.
7. Carlos Martinez, Yossi Drori and Joe Ciancio. Smart Battery Primer. Intersil Application Note. AN126.0. July 11, 2005.
8. Osvaldo Barbarisi, Roberto Canaletti, Luigi Glielmo, MicheleGosso, Francesco Vasca. State of charge estimator for NiMH batter-ies // Proceedings of the 41-st IEEE confer-ence on decision and control. Las Vegas, Nevada USA, december, 2002. . 17391734.
9. Francesco Esposito. A sub-optimal energy management strategy for hybrid electric vehicles. http://www.fedoa.unina.it/1944/1/Esposito_Francesco_Ingegneria_Elettrica.pdf
10. Xi Wei. Modelling and control of a hybrid electric drivetrain for optimum fuel econ-omy, performance and driveability. Disser-tation. Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University. 2004. 175 p.
11. .. / .. , .. . . : , 2005. 240 .
12. NickeI-metal hydride. Application Manual. 2001.
13. Technical Articles. Toyota Series Hybrid. High-Voltage battery http://www.autoshop101.com/forms/Hybrid03.pdf.
14. .. / .. - // . 2006. 1. . 1819.
15. . . -: / . . // . 2006. . 6. 3. . 146149.
16. M. Zolot, A. Pesaran, M. Mihalic. (NREL). Thermal Evaluation of Toyota Prius Battery Pack // National Renewable Energy Labo-ratory. Presented at the Future Car Con-gress, June 2002.
ИОАНЕСЯН АЛЕКСЕЙ ВИЛЬЯМОВИЧ
МОДЕЛИРОВАНИЕ НЕСТАЦИОНАРНЫХ РЕЖИМОВ РАБОТЫ АККУМУЛЯТОРНОЙ БАТАРЕИ ЭЛЕКТРОМОБИЛЯ
Специальность 05.09.03 - Электротехнические комплексы и системы
Диссертации на соискание ученой степени
Кандидата технических наук
Москва - 2009
Работа выполнена на кафедре «Электротехника и электрооборудование» в Московском автомобильно-дорожном институте (государственном техническом университете)
Ведущая организация: Федеральное государственное унитарное предприятие научно-исследовательский и экспериментальный институт автомобильной электроники и электрооборудования (ФГУП НИИАЭ), г. Москва.
Защита состоится 24 ноября 2009 г. в 10 00 часов на заседании диссертационного совета Д.212.126.05 при Московском автомобильно-дорожном институте (государственном техническом университете) по адресу:
125329 ГСП А-47, Москва, Ленинградский пр., д.64.
С диссертацией можно ознакомиться в библиотеке МАДИ(ГТУ)
Ученый секретарь
Диссертационного совета,
Кандидат технических наук, доцент Михайлова Н.В.
Общая характеристика работы
Актуальность проблемы
Автомобиль является источником выделения около 200 различных газов и химических соединений, ухудшающих экологическое состояние окружающей среды. Рост объемов производства и парка автомобилей в мире приводит к увеличению эмиссии отработавших газов, главным образом, в крупных городах. Кроме того, автомобили являются одним из основных потребителей углеводородного топлива, запасы сырья, для изготовления которого ограничены. Ужесточение экологических требований к автомобилям, сопровождаемое ростом цен на углеводородное топливо, активизировало работы по созданию альтернативных видов транспорта и в том числе электромобилей (ЭМ).В настоящее время крупнейшие производители автомобилей (General Motors, Ford, Daimler-Chrysler, Toyota, Honda, Nissan, Mazda и др.) ведут интенсивные работы по проектированию и производству электромобилей. По таким характеристикам как запас хода и грузоподъёмность некоторые современные модели электромобилей вплотную приближаются к традиционным автомобилям, однако основным их недостатком является высокая стоимость.
Характеристики электромобиля и его стоимость в значительной степени определяются параметрами используемой энергетической установки и, в частности, аккумуляторной батареи (АБ). Для оптимизации параметров энергетической установки, расчёта характеристик электромобиля и определения его эффективности в сравнении с традиционным автомобилем основными инструментами являются математическое и имитационное моделирование.
Наиболее сложной задачей при построении модели электромобиля является моделирование работы АБ при её нестационарном разряде и заряде на электромобиле. Расчетное определение и анализ параметров АБ, кроме того, требуется в системе управления АБ на электромобиле, которая обеспечивает оптимальные условия работы, увеличивает срок службы, предотвращает перезаряд и чрезмерный разряд, обеспечивает безопасность эксплуатации и информирует водителя о степени заряженности и других параметрах батареи.
Диссертация посвящена разработке моделей движения электромобиля и исследованию нестационарных режимов работы аккумуляторной батареи электромобиля, что представляется весьма актуальным в настоящее время.
Цель и основные задачи исследования
Целью настоящей работы является создание обобщенной имитационной модели движения электромобиля и выбор характеристик АБ под заданные режимы движения электромобиля.В соответствии с поставленной в диссертации целью решаются задачи:
Методы исследования
Теоретической основой диссертационной работы являются общая теория систем, методы оптимизации, случайные процессы, имитационное моделирование, исследование операций, регрессионный анализ, дисперсионный анализ и другие.Научная новизна
Научную новизну работы составляют методы и модели нестационарных режимов работы АБ электромобиля. На защиту выносятся:Практическая ценность и реализация результатов работы
Научные результаты, полученные в диссертации, доведены до практического использования. Разработан программно-моделирующий комплекс, позволяющий в интерактивном режиме использовать оперативные данные о состоянии процессов для принятия решений по выбору характеристик АБ электромобиля. Разработанные методы и алгоритмы прошли апробацию и внедрены для практического применения в ЗАО «МС ЛОГИСТИКА», ГНПП «КВАНТ», а также используются в учебном процессе в МАДИ (ГТУ). Результаты внедрения и эксплуатации подтвердили работоспособность и эффективность разработанных методов.Апробация работы
Содержание разделов диссертации докладывалось и получило одобрение:Во введении обосновывается актуальность работы, определена цель и поставлены основные задачи исследования.
В первой главе диссертации классифицированы современные АБ, определены их основные характеристики. Проведена систематизация известных методов расчета характеристик АБ и дана оценка возможности их применения при моделировании нестационарного нагружения.
Характеристики ЭМ в основном определяются показателями бортовых источников электрической энергии. В составе энергетических установок ЭМ наибольшее распространение получили свинцово-кислотные (PbAcid), никель-кадмиевые (Ni-Cd), никель-металлогидридные (Ni-MH) АБ и батареи на основе лития (Li-Ion, Li-Metal, Li-Polimer)
Анализируя характеристики различных типов АБ, заявленные производителями, можно выделить две группы: батареи высокой энергии (тяговые), применяемые на "чистых" электромобилях и выcокомощные (импульсные) батареи.

Удельная энергия батарей первой группы достигает для свинцово-кислотных 35 Вт∙ч/кг; никель-кадмиевых – 45 Вт∙ч/кг. Эти батареи отличаются небольшой стоимостью, однако их использование значительно снижает эксплуатационные характеристики и ограничивает область использования ЭМ.
Перспективными являются никель-металлгидридные АБ E m =80 Вт∙ч/кг, P m =200 Вт/кг, литий-ионные АБ E m =140 Вт∙ч/кг, P m =420 Вт/кг и их разновидность с полимерным электролитом (Li-Polimer) E m =205 Вт∙ч/кг, P m =420 Вт/кг. Значения удельной энергии приводятся для 3-x часового режима разряда, а значения мощности соответствуют импульсу длительностью 30 с при 80% степени заряженности.
Приведенных удельных характеристик батарей недостаточно для сравнения эффективности их использования на ЭМ, поэтому основной задачей диссертации является моделирование нестационарного нагружения АБ на ЭМ, для которой предлагается модель “черного ящика” с использованием классических методов планирования эксперимента.
По исследуемым параметрам (входным и выходным) можно выделить следующие группы методов:
Наиболее известным является метод аналитического описания разрядных характеристик АБ, предложенный Шефердом. Данный метод позволяет описать зависимость U
= f(I
,t
) в виде:
| , | (1) |
где Е s - начальное напряжение разряда, В; K - коэффициент поляризации, Ом∙см; N - внутреннее сопротивление элемента, Ом∙см; Q - количество (ёмкость) активного материала, А∙ч/элемент; I - ток разряда, А; t - время разряда, ч; А - эмпирический коэффициент, В; В - эмпирический коэффициент; С - коэффициент, (В∙см)/(А∙сек).
Основной недостаток метода заключается в том, что коэффициенты подбираются для определенного диапазона разрядных токов и при выходе за этот диапазон погрешность аппроксимации значительно увеличивается.
Одним из наиболее простых и точных способов оценки характеристик АБ при её нагружении изменяющимся во времени током является метод Хокси. В основе метода лежит соотношение Пейкерта, определяющее зависимость максимальной ёмкости батареи (времени разряда) от тока разряда
где I
1
, I
2
… I
z
– значения токов на участках графика разряда I
=f(t
); t
1
, t
2
... t
z
- время разряда соответствующими токами I
1
, I
2
… I
z
.
В данной модели график тока I =f(t ) представляет кусочно-постоянную функцию, разделенную на z участков. Для рабочего диапазона токов определяются коэффициенты Пейкерта. Для решения уравнения Хокси используется поисковый алгоритм определения t m при условии равенства единице правой части уравнения.
Применяя данный метод к расчёту электромобиля, задав в качестве исходного графика I =f(t ) изменение тока батареи в цикле движения, можно рассчитать максимальное количество циклов, которые выполнит электромобиль до полного разряда батареи N ц =t m /t ц , где t ц – длительность одного цикла.
В работе на основании имитационного эксперимента была проведена оценка точности нескольких методов упрощенного расчета нестационарного нагружения АБ при движении ЭМ в цикле SAE j 227С (табл.1.). Рассматривался ЭМ с АБ OPTIMA YellowTop D 1000 S (на ЭМ устанавливалось 10 последовательно соединённых АБ общей массой 195 кг).
Результаты расчёта движения электромобиля
| Количество циклов | t m , ч | I экв , А | L , км |
|
| Метод Хокси | 13,8 | 0,31 | 114 | 7,5 |
| Метод эквивалентного тока | 15,6 | 0,35 | 103 | 8,5 |
| Метод “Fractional Utilization” | 16,9 | 9,1 |
||
| Имитационная модель движения ЭМ | 14,6 | 132 | 7,9 |
Проведенное исследование показало согласованность результатов имитационного моделирования и результатов по Хокси. Однако необходимо учитывать, что значительную неточность может внести разбиение исходного графика нагрузки на интервалы с постоянным значением тока или мощности.
На основе проведенных в диссертации исследований для моделирования нестационарного нагружения АБ при различных режимах и условиях движения ЭМ предлагается использование гибридных аналитико-имитационных моделей на основе декомпозиционного подхода, который базируется на следующих аксиомах теории сложных систем: Иерархия: если 0 подсистема системы и (…) - мера сложности, то ( 0)(), т.е. подсистема не может быть более сложной, чем система в целом. Параллельное соединение: если = 1 2 ….. k , т.е. является параллельным соединением подсистем , то  . Последовательное соединение: если = 1 + 2 +…+ k , т.е. является последовательным соединением подсистем i , то () ( 1)+( 2)+... ( k). Соединение с обратной связью (ОС): если присутствует операция ОС из подсистемы 2 в подсистему 1 , то ()( 1)+( 2)+( 2 1). Перечисленные свойства сложной системы допускают возможность снижения ее видимой сложности путем объединения отдельных переменных в подсистемы. При такой декомпозиции преследуется цель упростить анализ системы, рассматривая ее как слабо связанную совокупность взаимодействующих подсистем.
. Последовательное соединение: если = 1 + 2 +…+ k , т.е. является последовательным соединением подсистем i , то () ( 1)+( 2)+... ( k). Соединение с обратной связью (ОС): если присутствует операция ОС из подсистемы 2 в подсистему 1 , то ()( 1)+( 2)+( 2 1). Перечисленные свойства сложной системы допускают возможность снижения ее видимой сложности путем объединения отдельных переменных в подсистемы. При такой декомпозиции преследуется цель упростить анализ системы, рассматривая ее как слабо связанную совокупность взаимодействующих подсистем.
Во второй главе ставится и решается задача формализации принципов построения имитационной моделиЭМ. Под функционированием понимается процесс изменения ее состояния во времени. Моделирование процесса в целом должно включать модель дорожного полотна, модели взаимодействия колеса с дорожным полотном, модели самой машины, трансмиссии и других, причем все они связаны между собой и вложены одна в другую (рис.2.).

Предполагается, что система
– это множество параметров  (влажность, угол поворота и др.). Каждый параметр q
i принимает множество числовых значений (q
i). Определим состояние
процесса в целом, как s j =, где q
i j (q
i). Процесс
Z
есть четверка: Z
=S
,
T
,
F
,
>,
где S
- пространство состояний; T
- множество времен изменения состояний; F
- фазовая характеристика процесса, определяемая как преобразование состояния во времени F:T
S,
- отношение линейного порядка на T
.
(влажность, угол поворота и др.). Каждый параметр q
i принимает множество числовых значений (q
i). Определим состояние
процесса в целом, как s j =, где q
i j (q
i). Процесс
Z
есть четверка: Z
=S
,
T
,
F
,
>,
где S
- пространство состояний; T
- множество времен изменения состояний; F
- фазовая характеристика процесса, определяемая как преобразование состояния во времени F:T
S,
- отношение линейного порядка на T
.
Интервал времени моделирования передвижения ЭМ равен [t
Н, t
К ], где  ,
,  . Предполагая, что на отдельных участках ЭМ ведет себя достаточно равномерно, возможна декомпозиция всего процесса на подпроцессы. Подпроцесс
есть подмножество процесса Z
на интервале времени [t
i ; t
j ]. Понятие подпроцесса позволяет рассматривать процесс в виде некоторой последовательности подпроцесов. Для обеспечения корректности описаний функционирования как системы в целом, так и ее компонентов, вводится ряд операций над процессами.
. Предполагая, что на отдельных участках ЭМ ведет себя достаточно равномерно, возможна декомпозиция всего процесса на подпроцессы. Подпроцесс
есть подмножество процесса Z
на интервале времени [t
i ; t
j ]. Понятие подпроцесса позволяет рассматривать процесс в виде некоторой последовательности подпроцесов. Для обеспечения корректности описаний функционирования как системы в целом, так и ее компонентов, вводится ряд операций над процессами.
Процесс Z
1 =S
1 , T
1 , F
1 , 1 > представляет свертку процесса Z
, если он получен в результате следующих преобразований: а) произведено полное разбиение интервала определения процесса Z
на n подинтервалов [ j , j+1 ], где j=1..n, причем 1 =t
Н
, n+1 =t
К
. Тогда мы получим разбиение процесса Z
на n подпроцессов Z
j
(j=1..n); б) поставим в соответствие каждому подпроцессу Z
j
одно значение состояния  из множества S
1
и одно значение времени j из интервала [ j , j+1 ]. Операция развертки является обратной по отношению к операции свертки: процесс Z
является разверткой процесса Z
1
. Процесс Z
1 является проекцией процесса Z
на координатное пространство
из множества S
1
и одно значение времени j из интервала [ j , j+1 ]. Операция развертки является обратной по отношению к операции свертки: процесс Z
является разверткой процесса Z
1
. Процесс Z
1 является проекцией процесса Z
на координатное пространство  (обозначение
(обозначение  ), если Q
1 Q.
), если Q
1 Q.
Пусть заданы процессы Z
1 =, T
1 , F
1 , 1 > и Z
2 =, T
2 , F
2 , 2 >. Процесс Z
=, T
, F
, > является объединением процессов Z
1 и Z
2 (обозначение Z
= Z
1 Z
2), если: S
Q является объединением пространств и  .
.
Введенные операции позволяют создать формализованное описание как отдельных составляющих процессов (профиль дороги, динамическое изменение характеристик движения и др.), так и взаимодействие компонентов всей системы.
Модель движения ЭМ включает компоненты, приведенные ниже.
Модель механической части
При движении ЭМ по участку дороги с сухим ровным асфальтобетонным покрытием без уклона сила сопротивления движению F c складывается из силы сопротивления качению F ск и силы сопротивления воздуха F св :| | (4) |
где f – коэффициент сопротивления качению; m – полная масса электромобиля, кг; g – ускорение свободного падения, м/с 2 , K v – коэффициент сопротивления воздуха, Н∙с 2 /м 4 ; S – поверхность обдува, м 2 ; V – скорость ЭМ, км/ч;
Сила сопротивления движению создаёт на колесе ЭМ момент сопротивления, который с учетом передаточных чисел трансмиссии приводится к валу электродвигателя с учетом КПД трансмиссии.
Таким образом, момент сопротивления движению на валу электродвигателя  где r
к – радиус качения колеса, м; i
тр – передаточное число трансмиссии;
где r
к – радиус качения колеса, м; i
тр – передаточное число трансмиссии;  тр – КПД трансмиссии.
тр – КПД трансмиссии.
Кроме того модель механической части должна учитывать движение ЭМ по участку дороги с уклоном (подъёмом или спуском) и сопротивление движению обусловленное неровностями дороги. При моделировании движения ЭМ на спусках следует учитывать рекуперацию энергии торможения.
Модель электродвигателя
В качестве тягового электродвигателя ЭМ в работе рассматривался двигатель постоянного тока (ДПТ). При всех известных недостатках этого типа двигателей, ДПТ позволяет регулировать частоту вращения в широких пределах наиболее простыми способами. Кроме того, используя двигатель независимого возбуждения, можно смоделировать множество рабочих характеристик различных типов, изменяя напряжение и задавая любые законы изменения тока возбуждения в функции тока якоря.Момент на валу электродвигателя определяется на основании:
 | (5) |
Полезная мощность Р 2 определяется из разности Р 2 = Р 1 - P п , где Р 1 - потребляемая от аккумуляторной батареи мощность; P п - суммарная мощность потерь в электродвигателе.
В имитационной модели электродвигателя суммарная мощность потерь рассчитывается на каждом шаге, на основании конструктивных параметров ДПТ и полученной при испытаниях характеристики холостого хода Е = f (I в) при постоянной частоте вращения вала электродвигателя.
Несмотря на тенденцию к использованию на ЭМ в качестве тяговых электродвигателей асинхронных двигателей или бесконтактных двигателей на постоянных магнитах, рассмотрение ДПТ остается наиболее удобным и вполне достаточным при решении задач имитационного моделирования ЭМ для получения картины нагружения АБ.
Модель системы управления
Управлять частотой вращения вала электродвигателя постоянного тока независимого возбуждения можно тремя путями: изменением напряжения на якоре, изменением магнитного потока или изменением сопротивления в цепи якоря. Для моделирования разгона ЭМ использовались первые два способа, сочетание которых принято называть двухзонным регулированием. Для упрощения расчёта ток якоря при разгоне поддерживался постоянным: на первом этапе – за счёт повышения напряжения, на втором – за счёт уменьшения магнитного потока. При достижении определённой скорости движения магнитный поток фиксируется, что обеспечивает через некоторое время выход электромобиля на режим движения с установившейся скоростью.Регулирование напряжения на двигателе U
Д
может производиться с помощью тиристорного устройства управления методом широтно-импульсного регулирования; при этом скважность
изменяется от 0 до 1:
 | (6) |
где U Б - напряжение батареи, В; t - длительность импульса напряжения U Д , с; T – период повторения импульсов, с.
Модель режимов движения
В работе смоделировано движение электромобиля, как в стандартном испытательном цикле SAE j 227 С, так и в режиме, сформированном на основании экспериментальных графиков движения. Цикл SAE j 227 С является одним из наиболее напряженных. Пробег за цикл составляет 537 м, средняя скорость движения - 25 км/ч, среднее ускорение при разгоне 0,74 м/с 2 , при торможении - 1,23 м/с 2 .На основании экспериментальных графиков движения разработана методика формирования режима движения путем случайного выбора циклов и формирования случайной их последовательности. Таким образом, имитировалось неупорядоченное городское движение.
Режимы движения, полученные на основании экспериментальных данных, существенно отличаются от режимов движения в цикле SAE j 227 C, в частности, при расчете для реальных режимов движения получен меньший удельный расход энергии (260 Вт·ч/км), чем для движении в цикле (390 Вт·ч/км).
Модель аккумуляторной батареи
В первой главе диссертационной работы были рассмотрены известные методы аппроксимации разрядных кривых АБ при постоянных значениях тока. Эти методы являются статическими, т.е. не учитывают изменение режима разряда аккумуляторной батареи, постоянно происходящего на электромобиле. При моделировании нестационарного нагружения АБ необходимо учитывать зависимость максимальной емкости батареи от тока разряда. Для этого наиболее подходящим является уравнение Пейкерта (2).На рис.3. представлен упрощенный алгоритм, позволяющий определить напряжение на АБ на каждом шаге расчета в имитационной модели движения электромобиля.

Данный подход к расчету нестационарного разряда АБ может быть распространен и на описание нестационарного заряда происходящего при рекуперативном торможении.
Конечной целью разработки модели электромобиля является определение его эксплуатационных показателей и характеристик АБ в заданном режиме движения. В качестве основных параметров были приняты следующие:
При моделироваении движения ЭМ в цикле SAE j 227 C были получены результаты со структурой данных представленной в табл.2.
Результаты факторного анализа (табл.3.) показали, что уже три фактора определяют 97% информации, что позволяет существенно сократить количество латентных факторов и, соответственно, размерность имитационной модели.
Результаты расчета основных показателей работы ЭМ при разгоне.
 |  |  |  |  |  |  |  |  | |  |  |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 1,00 | 129,93 | 25,21 | 250,00 | 7,2 | 19,49 | 120,11 | 3,00 | 280,92 | 0,46 | 4487,4 | 0,02 |
| 2,00 | 129,80 | 41,11 | 250,00 | 7,2 | 19,58 | 121,19 | 6,23 | 583,47 | 1,81 | 12873,1 | 0,32 |
| 38,00 | 116,73 | 116,30 | 111,73 | 3,4 | 26,36 | 23,40 | 47,53 | 4449,17 | 393,5 | 828817,1 | - |
Результаты факторного анализа (табл.3.) показали, что уже три фактора дают 97% информации, что позволяет существенно сократить количество латентных факторов и соответственно размерность имитационной модели.
Для уточнения аналитического представления разрядных характеристик АБ 6ЭМ-145, из которых сформирована аккумуляторная батарея электромобиля общей массой 3,5т и массой батареи 700 кг, с целью изучения возможности кратковременного подзаряда АБ в течение рабочей смены и, как следствие, увеличения пробега, был проведен эксперимент по испытанию батареи 6ЭМ-145 по специальной программе. Эксперимент проводился в течение 2 месяцев на 2-х батареях 6ЭМ-145.
Информативность абстрактных факторов
| Собственное значение | Процент дисперсии | Накопленные собственные значения | Накопленный процент дисперсии |
|
| 1 | 8,689550 | 78,99591 | 8,68955 | 78,9959 |
| 2 | 1,173346 | 10,66678 | 9,86290 | 89,6627 |
| 3 | 0,832481 | 7,56801 | 10,69538 | 97,2307 |
| 4 | 0,235172 | 2,13793 | 10,93055 | 99,3686 |
Испытания проводились по следующей методике:
Итоги множественной регрессии практически для всех зависимых переменных показали статистически значимые результаты (коэффициент корреляции был равен R =0,9989, а F -отношение F (2,6)=1392,8). В результате показана возможность правомерного использования линейных моделей.
Первый этап разгона рассчитывается при значении магнитного потока Ф = Ф max = 0,0072 Вб и поддержании тока якоря на постоянном уровне I я = I я1 = 250 А. Этот этап начинается в момент времени t = 0 и заканчивается при достижении скважности равной 1. Постоянные величины для данного этапа разгона: ток возбуждения I в = a ∙Ф max 3 + b ∙Ф max 2 + c ∙Ф max =10,68 А и напряжение на обмотке возбуждения U в = I ∙R ов
В соответствии с принципом двухзонного регулирования, увеличение частоты вращения вала электродвигателя при полном напряжении можно осуществить с помощью ослабления магнитного поля. Это реализуется в электронном регуляторе тока, управляющем независимой обмоткой возбуждения. Второй этап разгона начинается в момент времени, соответствующий =1 и заканчивается при достижении электромобилем заданной скорости. Начальными значениями V , n , U д и др. являются результаты расчёта последнего шага разгона при полном потоке, когда =1.
Результаты множественной регрессии
| Статис-тика | Стандарт-ная ошибка | Оценка Пара-метра регресс-сии
| Стандар-тная ошибка | Статис- тика Стьдента на доверитель-ный интервал
| уровень ошибки принятия значимо-сти парамет-ра регрессии |
|
| Свобод-ный член
| -0,267327 | 1,944346 | -0,13749 | 0,895142 |
||
| A | 0,005475 | 0,019047 | 0,006819 | 0,023722 | 0,28744 | 0,783445 |
| V3 | 0,999526 | 0,019047 | 1,233841 | 0,023513 | 52,47575 | 0,000000 |
Торможение электромобиля может быть механическим или рекуперативным. Последний этап движения в цикле начинается в момент времени t = t a + t cr + t co и заканчивается когда t = t a + t cr + t co + t b . Торможение в цикле SAE j 227 C происходит с постоянным замедлением, которое можно определить как: а=V выб /(3,6∙t b ) м/с 2 , где V выб - скорость к концу выбега, км/ч
Проведенные в диссертационной работе имитационные эксперименты по оценке характеристик движения ЭМ показали, что условно-нестационарный случайный процесс характеристик хорошо аппроксимируется процессом с автоковариационной функцией вида:
где r
1 (t)
и r
2 (t)
соответственно равны:
| . | (9) |
Получены аналитические выражения для описания условно-нестационарного процесса. Пусть вектор-столбец S=(S 0 , S -1 , ... , S -m ) T определяет значения характеристик передвижения (t ) в моменты St = t 0 , t -1 ,…, t - m , (t 0 >t -1 >.. >t -m ). Тогда математическое ожидание равно:
где D (t) = (r(t-t 0 ), r(t-t -1 ), ... , r(t-t -m ) вектор-строка ковариаций;
D =||cov((t i ), (t j ))||=||r(t i -t)||, i,j=0..-m - матрица ковариаций предыстории процесса в моменты t i , t j ; r(t) - автокорреляционная функция стационарного режима передвижения.
В качестве алгоритмов управления режимами движения ЭМ в диссертации выбраны алгоритмы стохастической аппроксимации. Пусть X векторная переменная в R N , для которой выполняются условия:
1. Каждой комбинации управляемых параметров X соответствует случайная величина Y характеристик передвижения с математическим ожиданием M Y(X) .
2. M Y(X) имеет единственный максимум, и вторые частные производные 2 M Y /x i x j ограничены на всей области изменения режимов управления.
3. Последовательности {a
k
} и {c
k
} удовлетворяют условиям:
| а)  , б) , б) , в) , в) , г) , г)  . . | (12) |
4. Рекуррентная последовательность случайных режимов управления определяется на основании переход по знаку приращения: .
5. Вектор Y k изменения характеристик передвижения определяется на основании реализации случайных значений текущих режимов X k в соответствии с одним из планов П 1 , П 2 или П 3:
П 1 =[X k , X k +c k E 1 , . . . , X k +c k E i , . . . , X k +c k E N ] T - центральный план;
П 2 =[X k +c k E 1 , X k -c k E 1 , . . . X k +c k E N , X k -c k E N ] T - симметричный план;
П 3 =[X k , X k +c k E 1 , X k -c k E 1 , . . . X k +c k E N , X k -c k E N ] T .- план c центральной точкой, где .
6. Дисперсия оценки характеристик передвижения k 2 при каждой комбинации режимов X
k ограничена k 2 2
Проведенные в диссертации исследования показали, что при выполнении перечисленных условий последовательность выбранных режимов управления X
k с вероятностью 1 сходится к оптимальным значениям.
В результате проведенной формализации алгоритм функционирования управляемой имитационной модели передвижения ЭМ представляет собой следующую последовательность действий:
1. Начальная настройка модели и выбор начальных режимов передвижения X 0 , k =0.
2. При заданной комбинации режимов X k в его локальной окрестности в соответствии с одним из планов П i (i=1,2,3) генерируются выборочные траектории характеристик передвижения ( Xk,l (t| s k )) l=1 L длительностью T каждая из общего начального состояния s k .
3. Вычисляются среднеинтегральные оценки характеристик для всех l
=1
…L
при общем начальном состоянии s
k
:
6. Задается начальное состояние s
k
+1
следующего интервала управления, равное конечному состоянию одного из процессов предыдущего шага.
7. В соответствии с выбранным критерием останова выполняется переход к пункту 2, либо к окончанию моделирования.
В четвертой главе проведена апробация разработанных методов и моделей.
При выборе размеров АБ, устанавливаемой на ЭМ, для оптимизации соотношения между грузоподъёмностью и пробегом электромобиля используют понятие транспортной работы A=G
Э
∙L
т∙км, где G
Э
– грузоподъёмность ЭМ, т; L
– запас хода ЭМ (пробег). Грузоподъёмность ЭМ G
Э
=G
0
- m
б / 1000 т, где G
0
=
G
А
–
m
– грузоподъёмность шасси, определяемая по грузоподъёмности базового автомобиля G
А
c учётом массы m
,
высвобождаемой при замене ДВС на систему электропривода, т; m
б – масса источника энергии, кг. Значение пробега L
электромобиля в общем случае рассчитывается по известной в литературе формуле  км, где E
m
- удельная энергия источника тока, Вт∙ч/кг;
- удельный расход энергии при движении, Вт∙ч/км. В результате для транспортной работы справедливо:
км, где E
m
- удельная энергия источника тока, Вт∙ч/кг;
- удельный расход энергии при движении, Вт∙ч/км. В результате для транспортной работы справедливо:
| т∙км, | (15) |
где: коэффициент  км/кг.
км/кг.
На основании разработанной имитационной модели был проведен расчет движения ЭМ на базе автомобиля ГАЗ 2705 "ГАЗель" с грузоподъёмностью G 0 =1700 кг. Расчёт проводился для источников, собранных из 10 последовательно соединённых блоков батарей OPTIMA D 1000 S. Число параллельно соединённых батарей в каждом блоке изменялось от 1 до 8. Таким образом, с шагом 20 кг изменялась масса источника энергии в теоретически возможных пределах от 0 до G А .
Расчёты были проведены для движения в цикле S АЕ j 227 С и для движения с постоянной скоростью. На рис.4. показаны теоретическая и полученная при имитационном моделировании зависимости транспортной работы от массы аккумуляторной батареи.

По результатам расчёта максимум транспортной работы достигается при массе батарей, несколько большей, чем половина грузоподъёмности. Это объясняется возрастанием удельной энергии E m источника тока с увеличением его ёмкости.
Цикл S АЕ j 227 С является одним из самых напряжённых испытательных циклов, безостановочный режим движения напротив, один из самых легких. Исходя из этого, можно предположить, что графики, соответствующие промежуточным режимам движения, будут располагаться в области, ограниченной соответствующими кривыми, а максимум транспортной работы при работе на батарее OPTIMA D1000S лежит в диапазоне от 920 до 926 кг.
В заключении представлены основные результаты работы.
Приложение содержит документы об использовании результатов работы.